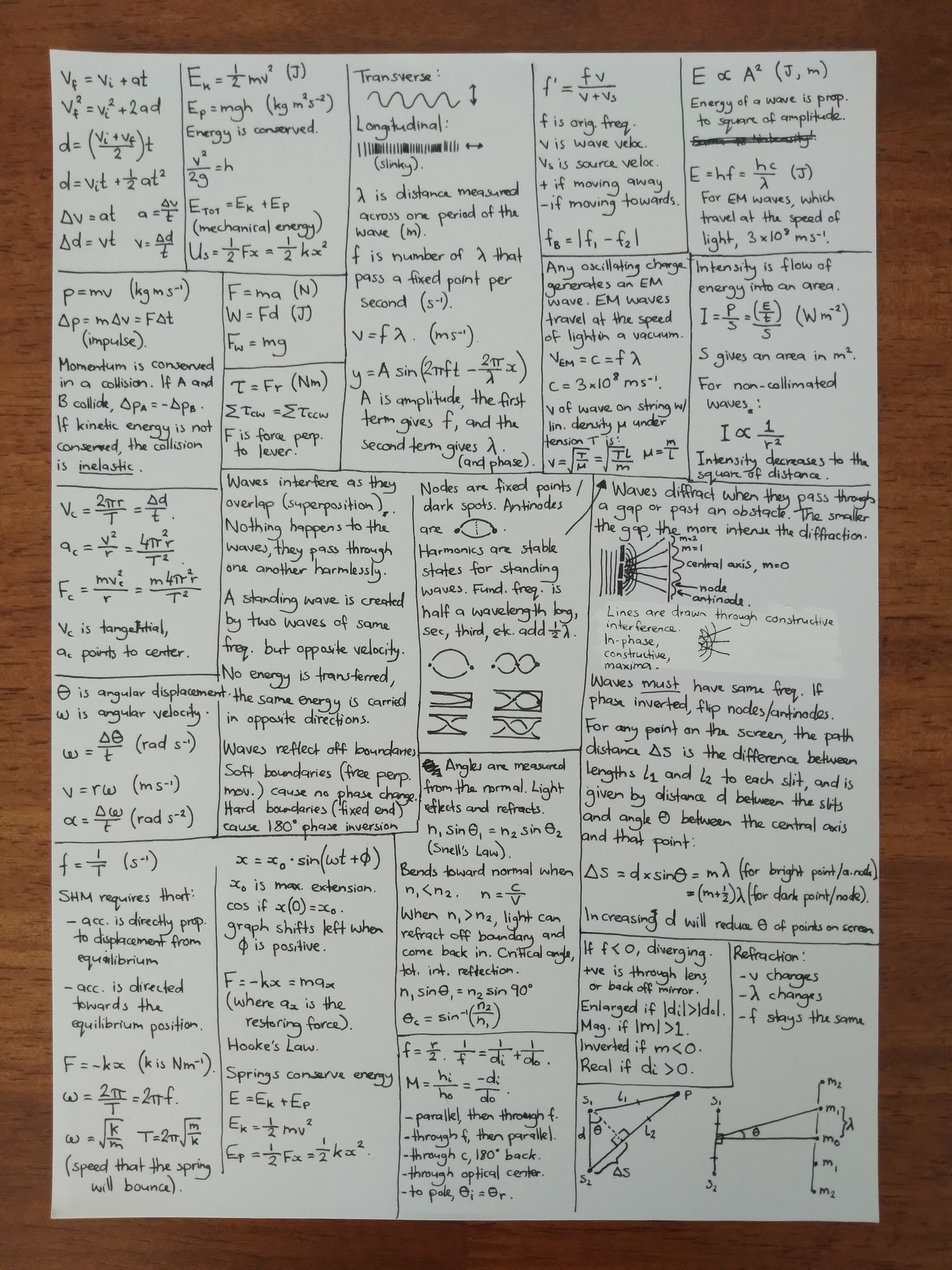
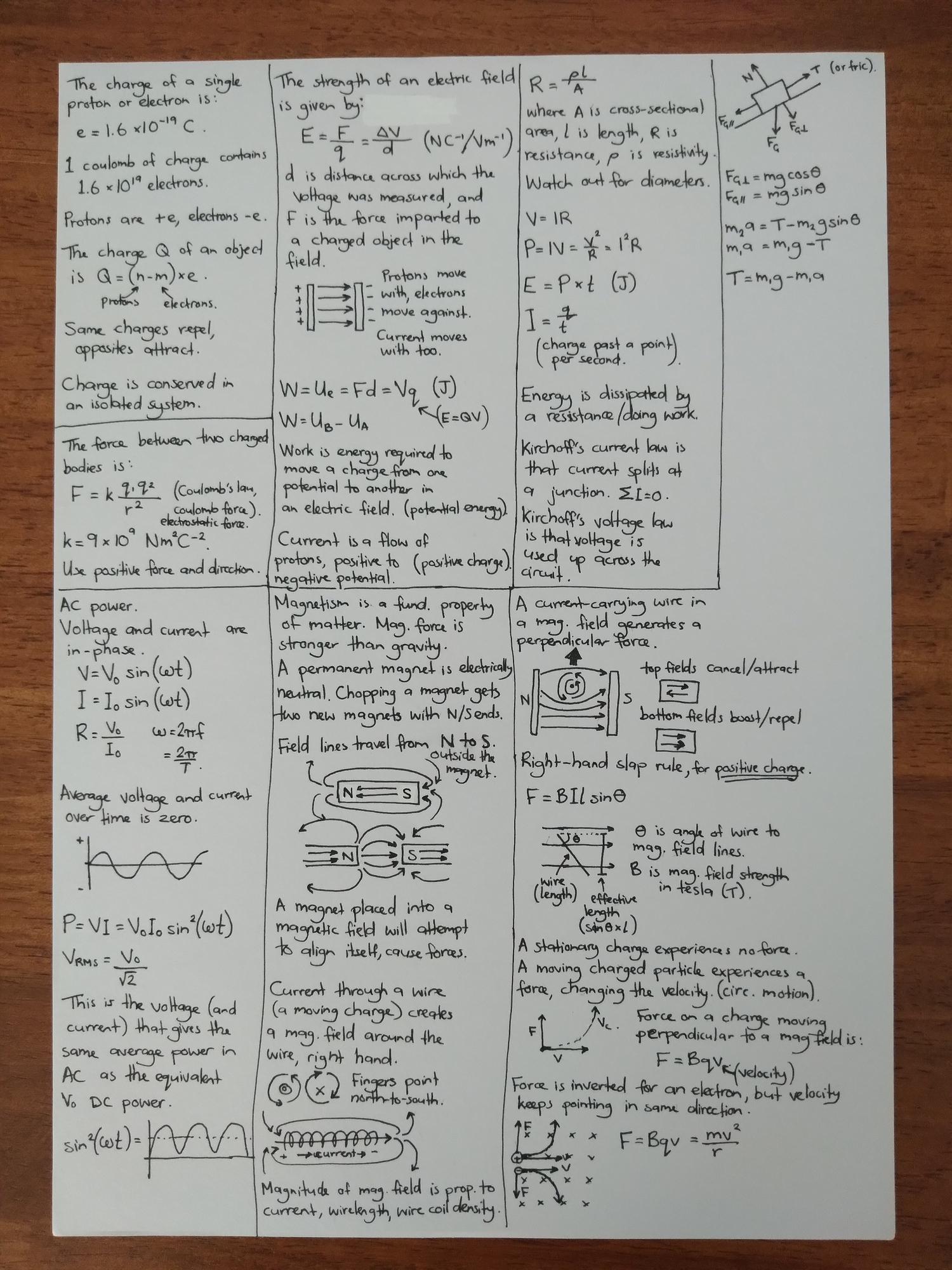
Like the mathematics page, this page has now been split into multiple sub-pages: Experimental techniques Units Kinematics Rotation and torque Simple harmonic motion Wave motion Optics Electromagnetism Cheat sheets